Please submit your message online, we will contact you as soon as possible!

Author:A
。
Emergency personnel location is still the most complex location application today. While there is no panacea sensor that can achieve the desired goal, there must be multiple technology nodes, each with leading-edge performance. In addition, it involves a large-scale sensor fusion and system integration approach.

Table 1. Complete Systems approach to key objectives
The main challenges facing system developers can be summarized in three broad categories: program, environment, and sensor fusion. The process of designing multi-sensor solutions requires a thorough understanding of the high complexity of first aid tasks and the challenges posed by various extreme environments.
Fire search and rescue missions must be carried out in strict accordance with rescue procedures, and at the same time must adapt to real life scenarios that are completely uncertain. Deployable precision positioning systems must accommodate existing processes and equipment to the maximum extent possible. This requires operating without any fixed or temporary infrastructure, as first responders are often already burdened with important equipment (weight and cost). Any system development should follow the early stage goals of implementing small embedded devices with a cost per first responder similar to a smartphone. It is necessary to point out that the current positioning performance of smartphones is seriously inadequate, and therefore faces challenges. Figure 1 Outlines the most relevant primary and secondary operational requirements for an ideal system.
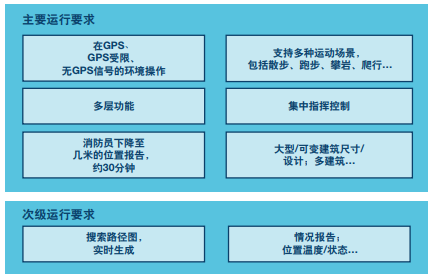
图1. 关键作业要求定义急救人员产品设计问题。
While GPS coverage makes outdoor positioning ubiquitous, it does not support fully indoor or mixed (indoor/challenging outdoor) environments. Some indoor positioning environments, such as shopping malls, can be achieved by installing infrastructure - however, these are neither accurate nor relevant to the practical objectives of first aid operations. For tracking system designers, the following factors must be considered to determine design, component selection, and risk mitigation methods:
The previously mentioned challenges in the process and environment are the basis for a core design approach to sensor fusion problems. Related primary sensing modes are used to deliver high performance in critical operating modes, while complementary sensors remove key barriers at each application stage, as shown in Table 2.
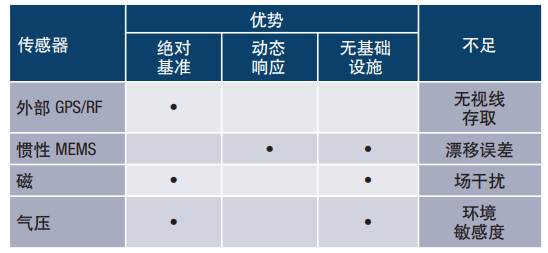
Table 2. Advantages and disadvantages of candidate sensors
Because MEMS requires no external infrastructure and can provide precision detection in dynamic environments, it can play a major role in the overall solution if it can work in extreme environments and if it is used in conjunction with the right secondary sensors.
Compared to the consumer segment, the industrial and automotive segments require precise inspection in relatively complex and extreme environments, and the vendor integrated architecture features specifically address factors that can affect performance, such as off-axis motion, vibration and shock events, and time and temperature errors. While these design features tend to be most easily accommodated through larger sensors or more expensive processing processes, economic pressures in the automotive and increasingly important industrial markets force a more critical approach to designing performance and achieving cost effectiveness.
Finally, MEMS components with high cost performance were developed specifically for industrial applications. As shown in Table 3, the percentage of error relative to the transmission distance of the three main categories of components was compared. Industrial-grade MEMS can provide the same quality navigation capabilities as high-end military equipment, while offering a reasonable price differential with commercialized consumer MEMS components.
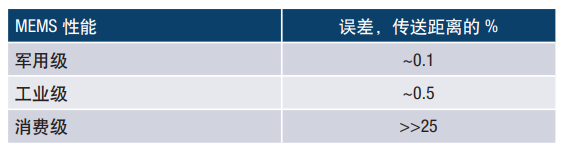
Table 3. MEMS navigation performance level vs. transmission distance error percentage
The reason for this advantage requires a careful look at the key specifications of MEMS components relevant to the target application. For first aid operations, a key task of MEMS sensors is to identify the current type of movement and measure the number and length of steps. Unlike the pedestrian movement model, the first aid worker movement will be more random, dynamic and difficult to identify. In addition, due to the presence of precision targets, the sensor must be able to suppress erroneous movements, such as vibrations, shocks, and foot or body rocking/swaying from side to side.
The first responder model is not a simple precision analysis of sensor noise that might be sufficient for a pedestrian model; it must also include key specifications such as linear g suppression and cross-axis sensitivity. Figure 4 compares three important RSS error specifications for industrial and low-end MEMS devices. It is easy to see that noise is not a disadvantage, but the unspecified linear g and cross-axis performance of many low-end devices is a major problem.
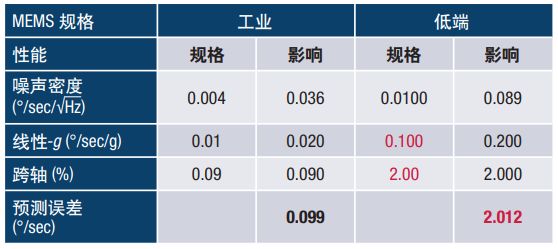
Table 4. Comparison of RSS errors for industrial and low-end MEMS shows that noise is not a performance factor
Assumed conditions: 50 Hz BW, 2 g rms vibration, 100º/sec off-axis rotation.
Although only a few years ago, high-performance inertial sensors were only possible through methods such as optical fiber, now industrial MEMS processes have clearly demonstrated that they are fully capable, and the key navigation indicators are compared in Table 5 below.
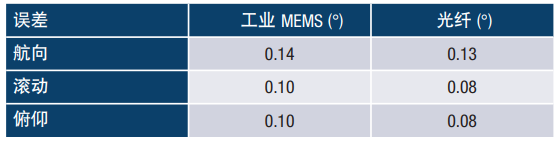
Table 5. Comparison of key navigation indicators of cost-effective industrial MEMS and traditional fiber optic gyroscopes
An example of an industrial MEMS IMU is the ADIS16488A, shown in Figure 2, which contains 10 degrees of freedom of high performance sensing and is suitable for the most demanding applications, commercial avionics (as shown in Table 6), proving its readiness for extreme emergency applications.

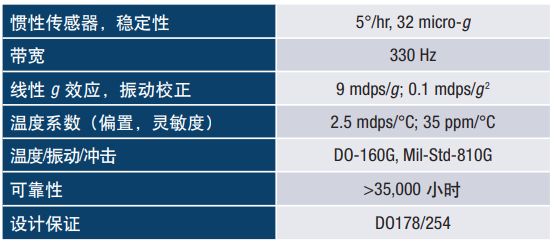
Table 6. ADIS16488A MEMS IMU; High cost performance and proven performance and reliability
Advances in inertial MEMS performance and continuously proven quality and durability are now being combined with significant advances in integration. This last hurdle is particularly challenging because, if not carefully managed, sensor size is inversely proportional to performance and durability. A series of process advances that are highly strategic, coordinated, and challenging must be tested and combined to meet the required level of performance density for this application, as shown in Figure 3.
Industrial MEMS IMUs have advanced performance, size, cost, and integration (unaffected) to support only critical applications such as first aid.
When selecting the appropriate sensor for a given application, an in-depth analysis should be performed to understand its weight (relevance) in the different stages of the overall task. For pedestrian dead reckoning, the solution mainly depends on the available devices (such as embedded sensors in smartphones), rather than by performance design. As a result, GPS is heavily relied upon, along with other available sensors, such as embedded inertia and magnetism, to play only a small part in determining useful location information. It works fine outside, but in challenging urban environments or indoors, GPS is not available, the quality of other available sensors is poor, there is a large gap, in other words, the quality of location information is uncertain. Although advanced filters and algorithms are often used to incorporate these sensors without the need for any additional sensors or better quality sensors, software does little to bridge the uncertainty gap and ultimately only greatly reduces confidence in reporting locations. A conceptual illustration is shown in Figure 4.
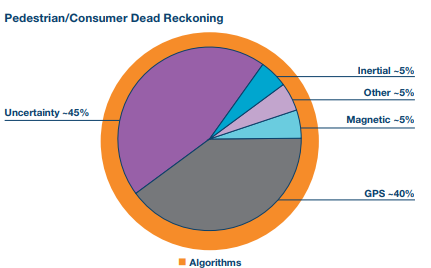
Figure 4. Smartphone-based pedestrian navigation, which mainly relies on GPS and is assisted by non-optimized pre-embedded sensors, has a large gap in the high confidence or reliable coverage of motion detection that cannot be repaired by algorithms alone.
In contrast, industrial dead reckoning solutions, such as first aid operations, are designed to define system performance and select components according to specific accuracy requirements. Better quality inertial sensors allow it to play a major role, making appropriate use of other sensors to close the uncertainty gap. Rather than calculating/estimating the position between reliable sensor readings, the algorithm is conceptually more concerned with optimal weights, switching and sensor cross-correlations, as well as understanding the environment and real-time motion dynamics (see Figure 5).
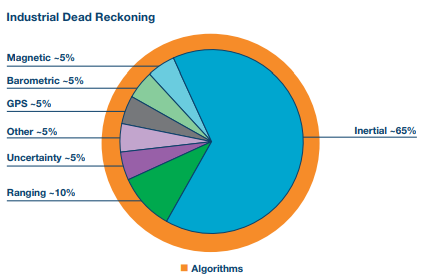
The sensors are selected specifically for full coverage of the first aid task range, and the accuracy and reliability of the system are greatly improved.
Accuracy can be improved in either of these cases by improving the quality of the sensor, and while sensor filtering and algorithms are an important part of the solution, they do not by themselves eliminate the gap in coverage of limited quality sensors.
In a specific first responder tracking case, the task is divided into the following stages to better assess sensor processing requirements: arrival on site, deployment, access to the building, and aid - Table 7. Imagine a fire truck equipped with a high-end GPS/INS system capable of determining the location of vehicles arriving at the scene as a known reference point. From this point until the firefighter enters the building, there is an uncertain and random motion sequence whose precise position and mapping system relies on the ultra-wide band range implemented in order to pinpoint the firefighter's position and direction. Once inside the building structure, the inertial sensor becomes the main tracking sensor, aiming to provide positioning accuracy of several meters.
If desired, the system can be designed to rely entirely on inertial sensors, but other available and reliable randomly transmitted signals can also be utilized, such as UWB range signals, magnetometer correction, and barometric measurements. As mentioned earlier, the algorithm implemented not only tracks the location, but also generates a real-time path map of the search pattern. If a firefighter falls or is in distress, the map generated by the initial path is supplemental sensor input to the rescue firefighter, also guided by inertial detection.

Table 7. Sensor requirements for different stages of first aid tasks
While high-performance sensors are certainly at the heart of a PLM system, the following are also key factors in making the system a reality:
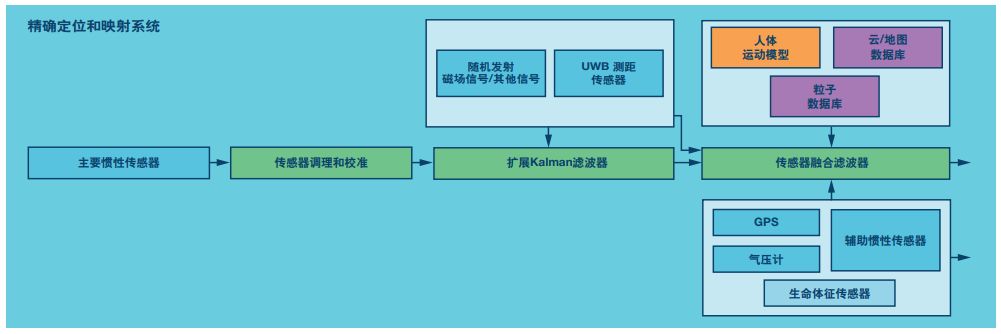
PLM systems are complete sensor fusion solutions based on high-performance sensors, complementary sensor filtering and processing, and cloud databases and analytics. Output exact location and search path map.
The precision positioning and mapping system provides an infrastructure-free approach to location detection, utilizing high-performance sensors and advanced algorithms to optimally merge all randomly transmitted signals. The goal of the system is to achieve meter-level accuracy and generate real-time path maps. Advances in industrial-grade MEMS inertial sensor technology support PLM, and a complete system development approach addresses technical hurdles while achieving commercial targets.
Subsequent work will focus on integrating the benefits of the latest generation of sensors and adapting to new concepts in emergency operation protocols. The final integration will include optimized size and ontology location, as well as a more complete implementation of the required communication links and final system qualifications.
Disclaimer | Some of the material is from Adno Semiconductor, reproduced only as an industry sharing exchange, does not represent the views of the company, copyright belongs to the original author. In case of infringement, please contact us. In addition, if you reprint this article, please indicate the source.
If you are interested in this article, please immediatelycontact us

Support Hotline
Please submit your message online, we will contact you as soon as possible!